- טרי
.jpg "ערכה רובוטית רוזית קול שליטה אינטראקטיבית Orbslam2+מיפוי אוקטומפ עבור Jetson Nano Xavier NX (Xavier NX Ultimate ver-without Xavier nx)")
טייס אוטומטי : תומך בבחירת צבע בהתאמה אישית, והרובוט יכול לזהות אוטומטית את אזור הצבע כדי לעקוב אחר הקו תוכן הקורס כולל : הרכבת Rosmaster X3, מערכת הפעלה לינוקס, קורסים של ROS ו- Open
CV, הסבר על מצלמה עומק ומיפוי לידר והסבר ניווט, מלמידה פשוטה ועד מעמיקה של מיפוי וניווט, זהו תהליך למידה מעמיק, אך אנו ממליצים כי ישנם תכנות משתמשים בסיסיים להשתמש בערכת רובוט זו. 5) בשילוב עם מודול האינטראקציה הקולי, המשתמש יכול לשלוט על מצב התנועה של הרובוט או להשלים פונקציות מסוימות באמצעות פקודות קוליות. הגדלת מציאות של AR : בחר את הגרפיקה המתאימה דרך האפליקציה, ותן לגרפיקה להופיע על נייר לוח הבדיקה באמצעות טכנולוגיית שיפור AR. זה יכול לחשב את תנוחת המצלמה בזמן אמת ולשחזר את הסביבה הסובבת בתלת מימד בתלת מימד בו זמנית. תצורת חומרה מעולה : גוף סגסוגת אלומיניום, 360 ° גלגלי mecanum onmnidectional, Li
Dar אופציונלי, מצלמת עומק באיכות גבוהה, מודול אינטראקציה קולית אופציונלית, לוח התפשטות מעוצב באופן מקצועי. ניתן להשיג נתוני תמונה / נקודה ענן ענן : מפת העומק, מפת הצבעים ומפת הענן של הנקודה של המצלמה ניתן להשיג דרך הצמתים המתאימים. מיפוי Orbslam2 : אתחול אוטומטי לחלוטין בשיטת מיצוי תכונות אורב. הימנעות מכשולים של LIDAR : LIDAR מגלה את הסביבה הסובבת בזמן אמת ומתכנן אולמות כדי להימנע ממכשולים. פיתוח Media
Pipe : דרך מסגרת פיתוח Media
Pipe, פונקציות גילוי ידיים, גילוי יציבה, גילוי כולל, איתור פנים, איתור תלת מימד והכרה. שומר לידר : יעדים הקרובים יותר ללידר יינעלו, וחזית מכונית הרובוט תמיד תתמודד עם היעד הזה. 3) זמינים ארבעה בקרים, JETSON NANO, JESTON XAVIER NX, JESTON TX2-NX ו- Raspberry PI. כל הפיתוח המעמיק צריך להסתיים על ידי הלקוחות עצמם. במצב RGB-D, ניתן להשיג את המידע בקנה מידה אמיתי. באמצעות תכנות פייתון, Rosmaster X3 יכול לממש מיפוי וניווט, בעקבות או הימנעות, טייס אוטומטי וגילוי גוף אנושי. ניווט רב-רובוט : רובוטים מרובים נמצאים באותה מפה כדי להשיג ניווט בנקודה אחת, ניווט רב-נקודה והימנעות מכשולים דינאמיים. הוא מצויד במעקר, מצלמה עומק, מודול אינטראקציה קולית ומודולי חומרה אחרים בעלי ביצועים גבוהים. זיהוי תגית AR : הוא תומך במעקב דינאמי וגילוי של תוויות קוד QR, ומשיג את קואורדינטות התנוחה של קוד QR בזמן אמת. זהו רובוט ROS מקצועי התומך בפיתוח רב יותר. מיפוי וניווט של LIDAR הימנעות : זה יכול לממש GMapping, Hector, Karto, אלגוריתמי מיפוי קרטוגרף, תכנון תמיכה בנתיב, הימנעות מכשולים דינאמיים, ניווט בודד וניווט רב-נקודה. זיהוי/מעקב צבעוני : בחר אזור צבע ספציפי במסך ותן לרובוט לעקוב אחר צבע זה בזמן אמת. 7) יינתנו 103 הדרכות וידאו מפורטות וקודי קוד פתוח, כמו גם עזרה טכנית מקצועית. חקר מעמיק של אלגוריתמים AI ורובוטים אינטליגנטים : Rosmasrer X3 מצויד במצלמה מעמיקה, לידר ומודול אינטראקציה קולי, שיכול לממש מערכת הפעלה של ROS, ניווט מיפוי תלת מימד של RTAB, PCL Point Cont יישומים, בקרה אינטראקטיבית קולית, תכנות פייתון, פיתוח STM32, פיתוח Media
Pipe, אימוני מודל יולו, תאוצה של Tensorrt (הערה : תכונות שונות תלויות בגרסה שתבחר). Orbslam2+מיפוי Octomap : Orb-Slam2 הוא מסגרת SLAM של קוד פתוח התומכת במצלמות Monocular, Binocular ו- RGB-D. בקרת סנכרון מרובי-רובוט : ידית אחת שולטת ברובוטים מרובים בזמן אמת, משלימה תנועות מסודרות ואחידות ומבין את הפונקציה של השליטה הסינכרונית.

ארוז באריזה בטוחה של ESD חלקים חדשים, מעולם לא השתמשו איכות שנבדקה על ידי אנשי מקצוע בתעשייה...

לקבל רגישות ניתן לאחסן נתונים בכרטיס SD מקומי, להעביר לענן באמצעות רשת Lora Wan או MQTT על פני TCP / IP, או מועברים ל

אורך 120 מ"ממעוצב עם יחס אוורור אופטימלי קל להתקנה ולהתאים לרוב מקרי המחשב משבצות האוויר של סילברסטון, שהת
7100% חדש לגמרי ואיכות גבוהה אנא בדוק גם את דגם ותמונה לפני הרכישה תואם עם אסר שואפים א314 31 א315 21 א31531 א31551 א31
אם יש לך שאלות, אנא הקפד לפנות אלינו100% חדש לגמרי ואיכות גבוהה קל לך להחליף שלך פגום ,סדוק או שבור אחד, מוכר

מהירות גבוהה אולטימטיבית : המרחיב מסוגל להרחיב את רוחב הפס של עד 16 ג'יגה ביט לשנייה ומעבר, כולל העברת נתונ
be / ays0fymfz4 סיכת הפרעה אופציונלית (2,3 או 4) מצוין לאב טיפוס ושילוב בפרויקטים שלך, מגן זה על כל לוח AVR (ורבים יות

ו922 ליטר / א או מ 13" רשתית 1706 , 1989 תואם עם מקבוק פרו (13 אינץ, 2016, ארבעה רעם 3 יציאות) מספר דגם : 1706 מספר הזמנה : 12

סטר אחד לשנייה והסר בכל פעם שתחליט תחושת מגע רכה משיי : גימור העור הרך או האולטרהמבוגרת של העור מרגיש נהד�

נגן השבבים של משטח קרמיקה (SMD) נגן השבבים של משטח קרמיקה (SMD) חלקים חדשים, מעולם לא השתמשו ארוז באריזה בטוחה

זה את החלפת כבל אם שלך מקורי אחד יש פגום טעינת יציאת או שקע כבל לא פונקציונליהחלפת שקע טעינה יציאת לרתום �

לוח פיתוח All Winner H3 512 M זרוע DDRA ארבע ליבות CortexA7 Super Raspberry Piלוח פיתוח All Winner H3 512 M זרוע DDRA ארבע ליבות CortexA7 Super Rasp

מיועד לחיק הטבע : נהדר לעיצוב ולכל פרויקט עץ חיצוני, המתאים לשימוש חיצוני וגם מקורה המוצר יפה ומעשי, קטן ב

0805 משטח קרמיקה משטח (SMD) נגד שבבים 0805 56 K 5% טרחה כללית קבוע נגד סרטים עבים של SMD ארוז באריזה בטוחה של ESD איכות

תודה * תאורה אחורית : לא *צבע : שחור *פריסה : פריסת מקלדת אמריקאית * סטטוס : דגמים תואמים חדשים לגמרי : עבור לו

מנשא שבבים מוביל מפלסטיק מושלם עבור קרש לחם, DIY, יצרנית, תיקון, אב טיפוס חלקים חדשים, מעולם לא השתמשו איכות

3 ס"מ זהו מחבר מתאם הכונן הקשיח לכונן הדיסק הקשיח של M מספר חלק נוח נוח : DC02 C009 M00.2 2280 כונני דיסק קשיח SSD או SSD.

הגנה ללא התפזורת* / / כל עור מגן מספק את המכשיר הנייד החדש של Apple i Phone XR שלך עם כיסוי דקיק קצה לקצה לשיפור ה

משלוח באותו יום אם נרכש לפני 4 בערב, בימים שני עד שישימפעל אטום לחדש עם אחריות מלאה כולל כל אביזרים מקוריי

אחריות משתמש קצה לשנה אחת משך מסביבת תפקוד אנא צור קשר ליבה 4 פתרונות לשאלות על משלוח מזורז, מצב פריט, אחר�

תן למכשיר ה USB 3 מפרט : פונקציה : לוח האם הרלוונטי רק יש שקע USB 2 חבר את המתאם לשקע ה USB 2.0 9 pin דיור לניתוח אם USB 3

חבילה כוללת : ערכת כבל נושא כלים מתאם שדרוג מ ' 2 אחד כמו בתמונה דגמים תואמים : עבור טינקפד איקס 270 א275...

: 00110058ספק קדם מגבר תמונה היא לא תמונת מדמין; זה הוא התמונה של פריט בפועל נמכר אם פריט תיאור והתמונה להשתנו

יש להם ראש אחיזה קל המאפשר התקנה פשוטה על ידי יד, ממש כמו ברגי אגודל קונבנציונליים7 '' פזו : 186 גרם; צבע : Tono Pl

5 אינץ' 2 מגהבייט 5400 סל " ד לכונן קשיח פנימי לכונן קשיח למחברת 421240 חה9אט00 אמצע כמעט דיסק קשיח עבור 40 ג 'יגהבי�
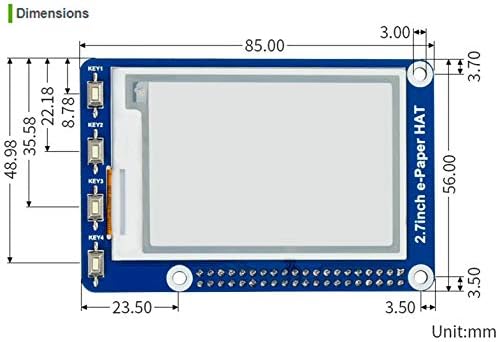
7 אינץ 'נייר נייר X1 RPI ברגים חבילה (2 יח') x2 PH2 מתרגם מתח על סיפון, התואם ל 3.217 רזולוציה : 264 x 176 צבע : שחור, לבן לב

על מנת לארגן את משלוח בשבילך באופן מיידי ,אנא שלח לנו שלך מחשב נייד דגם מספרהמפרט הוא מאוד חשוב כדי לעזור

652757ב21 כ " ס ג8 ג9 2טב 6 גרם 7 אם לא מרוצה מהרכישה, מוצרים מחודשים זכאים להחלפה או החזר כספי במסגרת הערבות המחו